Thomas Pierson — Structural Health Monitoring & Robotic Perception
:root{
–paper:#EEF1EC;
–paper-line: rgba(20,33,61,0.09);
–ink:#14213D;
–ink-soft:#48536B;
–ink-faint: rgba(20,33,61,0.45);
–instrument:#0E1A2B;
–instrument-2:#15263F;
–cyan:#7FD7E3;
–cyan-deep:#1E5A8E;
–amber:#D97C33;
–white-ink:#F3F5F0;
–rule: rgba(20,33,61,0.16);
–mono: ‘IBM Plex Mono’, ui-monospace, monospace;
–sans: ‘IBM Plex Sans’, system-ui, sans-serif;
–disp: ‘Lora’, Georgia, serif;
–maxw: 920px;
}
*{box-sizing:border-box;}
html{scroll-behavior:smooth;}
body{
margin:0;
background:var(–paper);
color:var(–ink);
font-family:var(–sans);
font-size:16px;
line-height:1.6;
-webkit-font-smoothing:antialiased;
}
a{ color:var(–cyan-deep); text-decoration:none; border-bottom:1px solid rgba(30,90,142,0.4); transition: color .15s ease, border-color .15s ease; }
a:hover{ color:var(–amber); border-color: rgba(217,124,51,0.55); }
:focus-visible{ outline:2px solid var(–amber); outline-offset:3px; }
/* ———- shared layout ———- */
.wrap{ max-width:var(–maxw); margin:0 auto; padding:0 28px; }
section{ position:relative; }
.eyebrow{ display:flex; align-items:center; gap:9px; margin-bottom:20px; }
.eyebrow .dot{ width:6px; height:6px; border-radius:50%; background:var(–amber); flex:none; }
.eyebrow .line{ width:30px; height:1px; background:var(–ink-faint); flex:none; }
.eyebrow .lbl{ font-family:var(–mono); font-size:12.5px; letter-spacing:.16em; text-transform:uppercase; color:var(–ink-soft); }
.eyebrow.on-dark .line{ background:rgba(243,245,240,0.35); }
.eyebrow.on-dark .lbl{ color:rgba(243,245,240,0.7); }
/* corner-bracket “plate” framing — recurring motif */
.plate{ position:relative; }
.tick{ position:absolute; width:11px; height:11px; pointer-events:none; }
.tick-tl{ top:-1px; left:-1px; border-top:1px solid var(–cyan-deep); border-left:1px solid var(–cyan-deep); }
.tick-tr{ top:-1px; right:-1px; border-top:1px solid var(–cyan-deep); border-right:1px solid var(–cyan-deep); }
.tick-bl{ bottom:-1px; left:-1px; border-bottom:1px solid var(–cyan-deep); border-left:1px solid var(–cyan-deep); }
.tick-br{ bottom:-1px; right:-1px; border-bottom:1px solid var(–cyan-deep); border-right:1px solid var(–cyan-deep); }
.plate.on-dark .tick{ border-color: var(–cyan) !important; }
/* ———- hero / instrument band ———- */
.hero{
background:
radial-gradient(900px 500px at 80% -10%, rgba(127,215,227,0.08), transparent 60%),
var(–instrument);
color:var(–white-ink);
overflow:hidden;
}
.hero-inner{ padding: 26px 28px 0; }
.topbar{ display:flex; align-items:center; justify-content:space-between; gap:16px; padding-bottom:18px; border-bottom:1px solid rgba(243,245,240,0.12); }
.monogram{ font-family:var(–mono); font-size:13px; letter-spacing:.14em; color:rgba(243,245,240,0.85); }
.monogram b{ color:var(–cyan); font-weight:600;}
nav{ display:flex; gap:22px; }
nav a{ font-family:var(–mono); font-size:12.5px; letter-spacing:.1em; text-transform:uppercase; color:rgba(243,245,240,0.7); border-bottom:none; }
nav a:hover{ color:var(–amber); }
.hero-content{ padding: 56px 0 0; max-width: 760px; }
.hero-eyebrow{ font-family:var(–mono); font-size:12.5px; letter-spacing:.16em; text-transform:uppercase; color:var(–cyan); margin-bottom:18px; }
.hero h1{
font-family:var(–disp); font-weight:600;
font-size:clamp(2.6rem, 7vw, 5rem);
line-height:1.04; letter-spacing:-0.005em;
margin:0 0 18px;
color:var(–white-ink);
}
.hero p.lede{
font-size:clamp(1.02rem, 2vw, 1.2rem);
color:rgba(243,245,240,0.82);
max-width: 56ch;
margin:0 0 30px;
}
.contact-row{ display:flex; flex-wrap:wrap; gap:0; font-family:var(–mono); font-size:13px; }
.contact-row a{ color:rgba(243,245,240,0.88); border-bottom:1px solid rgba(243,245,240,0.3); padding:6px 16px 6px 0; }
.contact-row a:hover{ color:var(–amber); border-color:rgba(217,124,51,0.6); }
.contact-row span.sep{ color:rgba(243,245,240,0.3); padding:6px 14px 6px 0; }
/* ———- wavefield scope graphic ———- */
.scope-wrap{ position:relative; margin: 44px 0 0; }
.scope-wrap svg{ display:block; width:100%; height:auto; }
.plate-rect{ fill:none; stroke:rgba(127,215,227,0.5); stroke-width:1; }
.scan-dot-grid circle{ fill:rgba(127,215,227,0.22); }
.actuator{ fill:var(–amber); }
.ring{
fill:none; stroke:var(–cyan); stroke-width:1.1;
transform-box: fill-box; transform-origin:center;
animation: ripple 3.6s ease-out infinite;
opacity:0;
}
.ring2{ animation-delay:1.2s; }
.ring3{ animation-delay:2.4s; }
@keyframes ripple{
0%{ transform:scale(0.04); opacity:0.8; }
65%{ opacity:0.22; }
100%{ transform:scale(1); opacity:0; }
}
.scanner{ transform-box: view-box; animation: raster 6s linear infinite; }
.scanner circle{ fill:var(–amber); filter: drop-shadow(0 0 5px rgba(217,124,51,0.85)); }
@keyframes raster{
0% { transform: translate(118px,108px); }
11% { transform: translate(636px,108px); }
13% { transform: translate(636px,168px); }
24% { transform: translate(118px,168px); }
26% { transform: translate(118px,228px); }
37% { transform: translate(636px,228px); }
39% { transform: translate(636px,288px); }
50% { transform: translate(118px,288px); }
52% { transform: translate(118px,108px); }
100% { transform: translate(118px,108px); }
}
.led{ fill:var(–amber); animation: blink 1.5s ease-in-out infinite alternate; }
@keyframes blink{ from{opacity:1;} to{opacity:.25;} }
.scope-label{ font-family:var(–mono); font-size:11px; letter-spacing:.08em; fill:rgba(243,245,240,0.55); }
@media (prefers-reduced-motion: reduce){
.ring, .scanner, .led{ animation:none !important; }
.ring{ opacity:0.28; transform:scale(0.55); }
.scanner{ transform: translate(377px,198px); }
}
.hero-foot-space{ height:38px; }
/* ———- vellum sections ———- */
.vellum{
background-image:
linear-gradient(var(–paper-line) 1px, transparent 1px),
linear-gradient(90deg, var(–paper-line) 1px, transparent 1px);
background-size: 28px 28px;
background-position: -1px -1px;
}
.section-pad{ padding: 76px 0; }
.rule{ border:none; border-top:1px solid var(–rule); margin:0; }
/* about */
.about-grid{ display:grid; grid-template-columns: 1.5fr 1fr; gap:48px; align-items:start; }
.about h2{ font-family:var(–disp); font-weight:700; font-size:clamp(1.6rem,3vw,2.1rem); margin:0 0 18px; letter-spacing:-0.01em; }
.about p{ margin:0 0 16px; color:var(–ink); max-width:60ch; }
.about p:last-of-type{ margin-bottom:0; }
.photo-frame{ position:relative; border:1px solid var(–rule); padding:8px; background:rgba(255,255,255,0.4); }
.photo-frame img{ display:block; width:100%; height:auto; filter: grayscale(15%) contrast(1.02); }
.photo-cap{ font-family:var(–mono); font-size:11.5px; letter-spacing:.08em; color:var(–ink-faint); margin-top:8px; text-align:center; }
.affiliations{ position:relative; max-width:188px; margin-top:34px; border:1px solid var(–rule); padding:8px; background:rgba(255,255,255,0.55); }
.affiliations img{ display:block; width:100%; height:auto; }
.affiliations + .photo-cap{ max-width:188px; }
.spec-table{ margin-top:26px; border-top:1px solid var(–rule); }
.spec-row{ display:grid; grid-template-columns: 140px 1fr; gap:14px; padding:10px 0; border-bottom:1px solid var(–rule); }
.spec-row dt{ font-family:var(–mono); font-size:11.5px; letter-spacing:.1em; text-transform:uppercase; color:var(–ink-faint); }
.spec-row dd{ margin:0; font-size:14.5px; color:var(–ink); }
/* research log */
.log-head{ display:flex; justify-content:space-between; align-items:baseline; flex-wrap:wrap; gap:10px; margin-bottom:34px; }
.log-count{ font-family:var(–mono); font-size:12px; letter-spacing:.1em; color:var(–ink-faint); }
.log-entry{ display:grid; grid-template-columns: 220px 1fr; gap:30px; padding:30px 0; border-bottom:1px solid var(–rule); align-items:start; }
.log-entry:last-child{ border-bottom:none; }
.log-fig{ position:relative; }
.log-fig a{ display:block; border-bottom:none; }
.log-fig img{ display:block; width:100%; height:auto; border:1px solid var(–rule); filter: grayscale(8%); transition: filter .2s ease; }
.log-fig a:hover img{ filter:none; }
.fig-tag{ position:absolute; top:8px; left:8px; background:var(–instrument); color:var(–white-ink); font-family:var(–mono); font-size:10.5px; letter-spacing:.08em; padding:3px 7px; }
.log-text h3{ font-family:var(–disp); font-weight:700; font-size:1.2rem; margin:0 0 8px; letter-spacing:-0.005em; }
.log-text p{ margin:0 0 10px; font-size:14.5px; color:var(–ink-soft); }
.log-links{ font-family:var(–mono); font-size:12.5px; }
.log-links a{ margin-right:16px; }
/* contact / footer title block */
.footer{ background:var(–instrument); color:var(–white-ink); }
.footer .wrap{ padding: 56px 28px 0; }
.footer h2{ font-family:var(–disp); font-weight:700; font-size:clamp(1.7rem,4vw,2.4rem); margin:0 0 14px; }
.footer p{ color:rgba(243,245,240,0.78); max-width:54ch; margin:0 0 26px; }
.footer .contact-row{ margin-bottom:50px; }
.titleblock{ border-top:1px solid rgba(243,245,240,0.18); }
.tb-grid{ display:grid; grid-template-columns: repeat(4, 1fr); }
.tb-cell{ border-right:1px solid rgba(243,245,240,0.18); border-bottom:1px solid rgba(243,245,240,0.18); padding:12px 16px; }
.tb-cell:last-child{ border-right:none; }
.tb-label{ display:block; font-family:var(–mono); font-size:9.5px; letter-spacing:.12em; text-transform:uppercase; color:rgba(243,245,240,0.45); margin-bottom:4px; }
.tb-value{ font-family:var(–mono); font-size:12.5px; color:rgba(243,245,240,0.92); }
.tb-value a{ color:rgba(243,245,240,0.92); border-color:rgba(243,245,240,0.35); }
.tb-value a:hover{ color:var(–amber); }
/* ———- responsive ———- */
@media (max-width: 760px){
.about-grid{ grid-template-columns:1fr; }
.photo-frame{ max-width:320px; }
.log-entry{ grid-template-columns:1fr; }
.tb-grid{ grid-template-columns: repeat(2, 1fr); }
.tb-cell:nth-child(2){ border-right:none; }
nav{ gap:14px; }
nav a{ font-size:11px; }
}
@media (max-width: 480px){
.wrap{ padding:0 20px; }
.tb-grid{ grid-template-columns: 1fr; }
.tb-cell{ border-right:none; }
}
Thomas
Pierson
I work on perception and sensing problems for space vehicles, robots, and computer hardware.
SCAN — ACTIVE
CH.1 · Z-DISPLACEMENT / LDV
Hey, thanks for visiting my website!
I’m currently researching at Los Alamos National Laboratory on 3D ML neural radiance wavefield reconstruction for a robotic laser doppler vibrometer. more here soon, once it clears review.
This fall I’ll join the first Cambridge AI Safety Hub Hardware Security Cohort, alongside starting grad school at Carnegie Mellon University, working on 3D models for robotic perception.
I grew up in Albuquerque and finished my B.S. at New Mexico Tech. I built the first piezoelectric wafer testing experiment in space, which flew on the MISSE platform on the International Space Station. I also led a team to $10k in NASA competition funding for an optical damage-detection sensor, among other things. Along the way I’ve worked with AFRL, Sandia, and NASA on internship and Co-Op teams.
I’m usually open to new projects or meeting new people, feel free to reach out!

- Location
- Albuquerque, NM
- Current
- Los Alamos National Laboratory
- B.S.
- New Mexico Tech
- Next
- M.S., Robotics — Carnegie Mellon
- Fall 2026
- Cambridge AI Safety Hub — Hardware Security Cohort

SPIE Paper Published
“Structural health monitoring payload for the MISSE platform on the International Space Station” — Thomas Pierson, Dr. Andrei Zagrai, Evgenii Volkov.
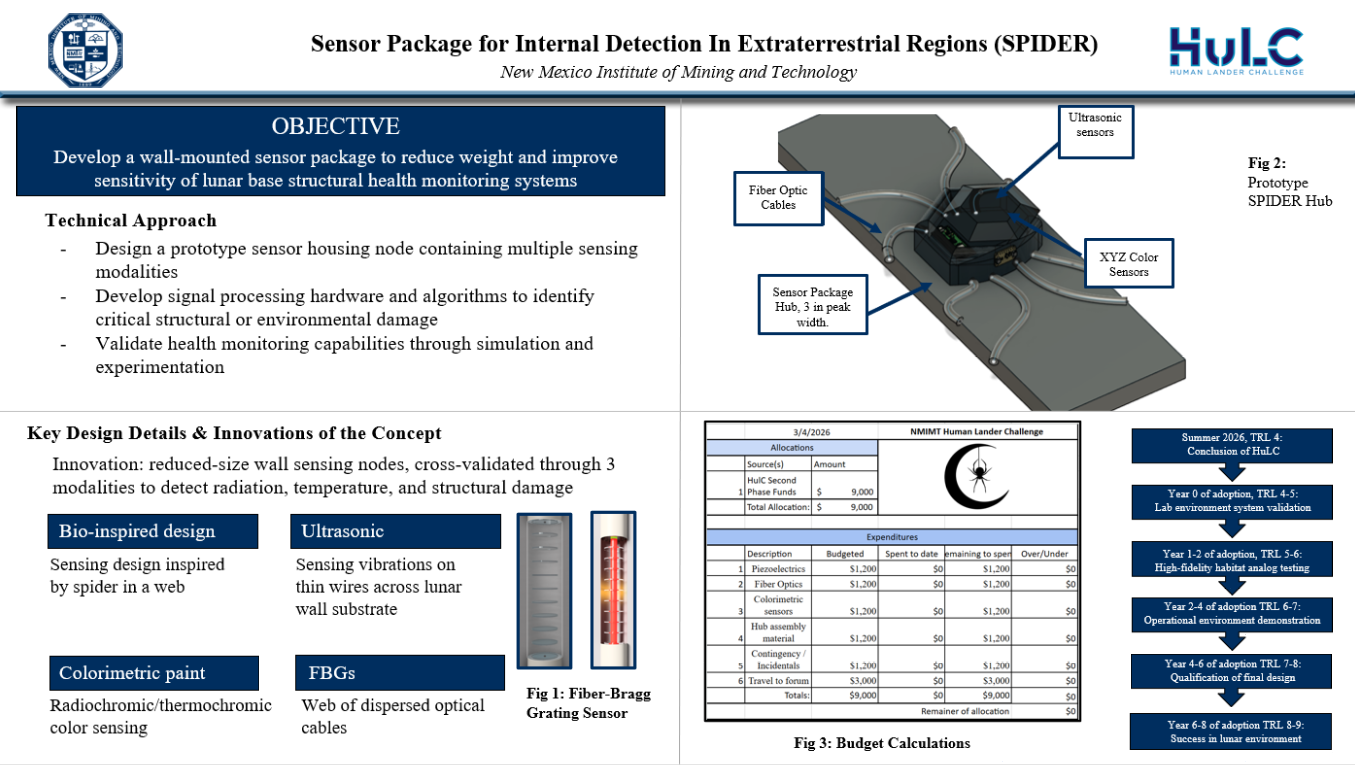
NASA HuLC Competition Finalist
Proposal submitted and approved — Thomas Pierson, Shawna Dodge, Riley Morris.

AFRL Mentorship
Project leader of a team of interns for the Space Vehicles Directorate.
