Built a neural radiance field model of a clay kangaroo that my girlfriend Helena made for me! The quality of the render is very good (higher quality than the youtube upload shows). I think I will work on segmenting the images to only include the clay figure in order to remove the background, and mess around with gaussian splatting. I used mip-nerf from nerfstudio for this.
11 May 2026
3D sweep with the robotic arm works now… thanks Evan Pratten for this image. Here is the code I made to sweep values in 3D spherical space around an object, using xy-plane angle, azemuth, and distance from object.
8 May 2026
I was able to implement a 2D sweep for NeRF images. Most of the issues arose from trying to get the end effector angle right with quaternions, but it turns out there is a pretty easy Euler to quaternion function in python. I want to turn this into a full half-sphere sweep next.
If we define an origin point at the center of the object
Then,



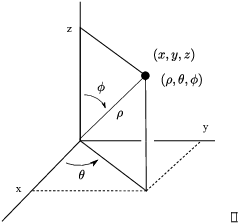
Using just the x-y plane, lets make a sweep function
I define the center of motion for ROS cartesian coordinates to be (0.3,0,0) because the x-direction is in front of the arm and this is a valid point. The sweep is just a for loop iterating theta values.
In robot coords:



7 May 2026
I added python controls for a simulated 6DOF UFactory robotic arm. I was having issues with declared joint order from demo scripts not matching the RViz simulation joint order, but I got that fixed today.
Anyway, I want to turn this into an easy-to-use script for planning a camera path for NeRF imaging.

Leave a comment